
 Audit hochschule und familie
Audit hochschule und familie

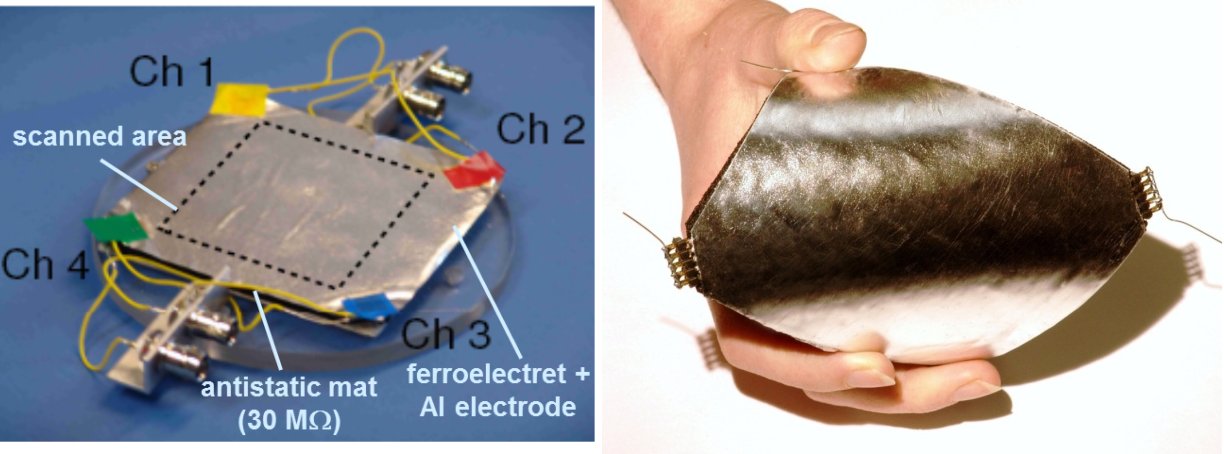
Abbildung 1: (a) Ferroelektret-Touchpad auf einem Probenhalter. Die benutzte Sensorfläche ist auf der Photographie durch eine strichlierte Linie gekennzeichnet. (b) Das angefertigte Ferroelektret-Touchpad ist biegsam.
Position Indication:
Content

Gerda Buchberger - Wie Roboter das Fühlen lernen
Konzepte für Touchpads, Tastenfelder und positionsempfindliche Berührungssensoren und deren flexible Realisierungen auf Basis von zellulären Polypropylen‑Ferroelektreten
oder
Wie Roboter das Fühlen lernen
Gerda Buchberger
angefertigt an der Abteilung für Physik der Weichen Materie des Instituts für Experimentalphysik
In den letzten Jahren hat sich die Technologie der Makroelektronik als neuer Trend parallel zur Mikroelektronik entwickelt. Ziel der Makroelektronik ist es, möglichst großflächige, elektronische Komponenten herzustellen. High-End-Anwendungen von Makroelektronik sind zB flexible Displays, druckbare Dünnfilmsolarzellen und elektronische Textilien. Die Technologie der Makroelektronik zeigt insbesondere auch Wege zu großflächigen Mensch-Maschine-Interfaces auf, wie zusammenrollbaren Touchpads und Tastaturen, sowie zu einer „elektronischen Haut“ für Roboter.
Als Inspirationsquelle für wünschenswerte Attribute von Makroelektronik dient vielfach die menschliche Haut, die die Schnittstelle zwischen Mensch und Umgebung bildet. Zur Zeit wird intensiv daran gearbeitet, neben Großflächigkeit und ortsabhängiger Berührungsempfindlichkeit auch andere Funktionalitäten der menschlichen Haut wie zB Biegsamkeit in Elektronik zu integrieren. Als besonders vielversprechendes, flexibles Funktionsmaterial erscheint in diesem Zusammenhang zelluläres Polypropylen-Ferroelektret. Es handelt sich dabei um piezoelektrischen — also berührungsempfindlichen — Plastikschaum, dessen Hohlräume elektrisch aufgeladen sind und sich daher wie „künstliche“, makroskopische Dipole verhalten.
Unter Verwendung solch zellulärer Polypropylen-Ferroelektrete ist es an der Abteilung für Physik der Weichen Materie gelungen, zusammenrollbare Touchpads und Tastaturen anzufertigen. Abbildung 1 zeigt den Prototypen eines biegsamen Ferroelektret-Touchpads auf einem Probenhalter (links) sowie die Biegsamkeit des angefertigten Prototypen (rechts).
Bei den meisten konventionellen Berührungssensoren ist zur Erzielung von Positionsempfindlichkeit eine Unterteilung der Bauteile in einzelne Pixel notwendig. Der Herstellungsprozess ist entsprechend kompliziert und teuer. Die im Rahmen meiner Masterarbeit entwickelten Konzepte für Touchpads und Tastaturen machen diese Strukturierung der Bauteile überflüssig. Die Bestimmung der Position erfolgt im Fall des Touchpads über die durch eine widerstandsbehaftete Schicht gedämpfte Spannungsamplitude; bei der Tastatur geschieht dies über die den einzelnen Tasten zugeordneten Polarisationssequenzen. Die entsprechenden Schema-Skizzen sind in Abbildung 2 und in Abbildung 3 gezeigt.
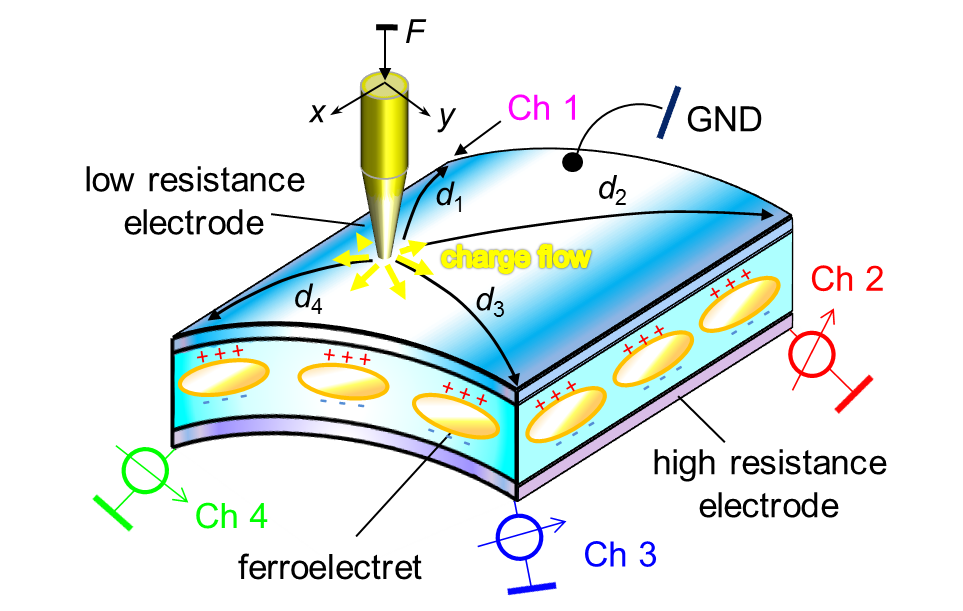
Abbildung 2: Schema-Skizze eines flexiblen Ferroelektret-Touchpads mit vier Ausgängen an den Ecken. Es besteht aus einem Ferroelektret-Film, der mit großflächigen Elektroden versehen wird. Die obere Elektrode ist gut-leitend und die untere Elektrode widerstandsbehaftet.
Weiters wird bei gängigen Technologien zur Lokalisierung des Druckpunktes auf der Sensoroberfläche eine externe Versorgungsspannung benötigt. Im Gegensatz dazu sind in unserem Prototyp die angefertigten Sensoren aufgrund der Piezoelektrizität des verwendeten Materials „aktiv“ und erlauben so die Lokalisierung eines Druckpunktes ohne externe Versorgungsspannung.
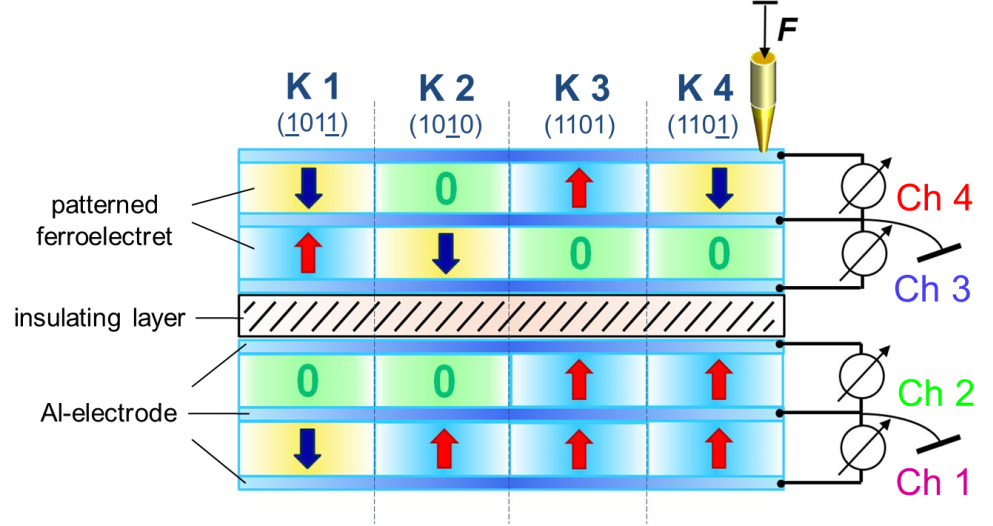
Abbildung 3: Schema-Skizze des angefertigten, vier-lagigen Tastenfeldes. Der gesamte Sensor ist nur ~ 0,5 mm dick.
Ich konnte zeigen, dass Bauteile gemäß den entwickelten Konzepten mittels Telegraphengleichungen modelliert werden können. Die Materialwahl bei den angefertigten Bauteilen erlaubt es, Terme in den Telegraphengleichungen zu vernachlässigen, wodurch diese zu Diffusionsgleichungen werden. Die mathematische Beschreibung der den Bauteilen zugrundeliegenden physikalischen Prozesse ermöglicht eine auf ein bestimmtes Anwendungsgebiet zugeschnittene Wahl der Materialparameter und der Auswerteeinheit.
Die Funktionsfähigkeit der angefertigten Prototypen wurde experimentell über die Messvorrichtung aus Abbildung 4 getestet. Zur ortsempfindlichen Charakterisierung werden die angefertigten Prototypen auf einem xy-Verschiebungstisch befestigt. Über einen elektromagnetischen Stempel erfolgt das Aufbringen von definierten Kräften, wobei ein Oszilloskop die zugehörigen Spannungsantworten aufzeichnet. Ein Mathematica-Programm erlaubt es, den aufgenommen Spannungssignalen eindeutig den ursprünglichen Druckpunkt zuzuordnen. Beispielhafte Signallandschaften der maximalen Spannungsamplituden an den vier Ausgängen Ch 1 bis Ch 4 eines Ferroelektret-Touchpads sind in Abbildung 5 dargestellt.
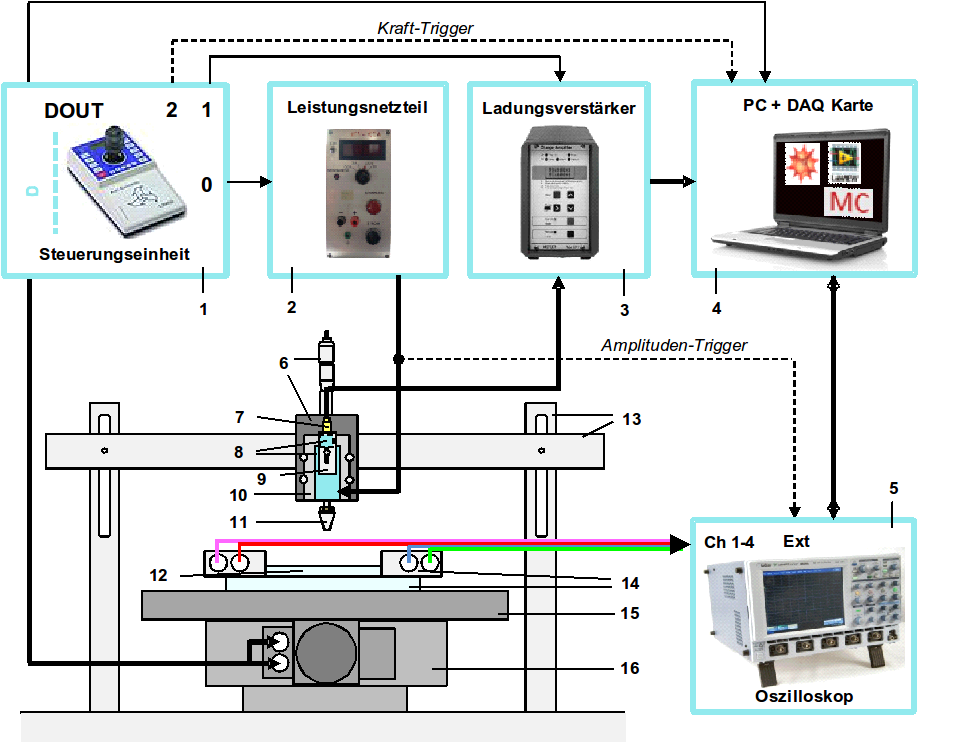
Abbildung 4: Schematische Skizze der Messvorrichtung zur Charakterisierung der angefertigten Prototypen
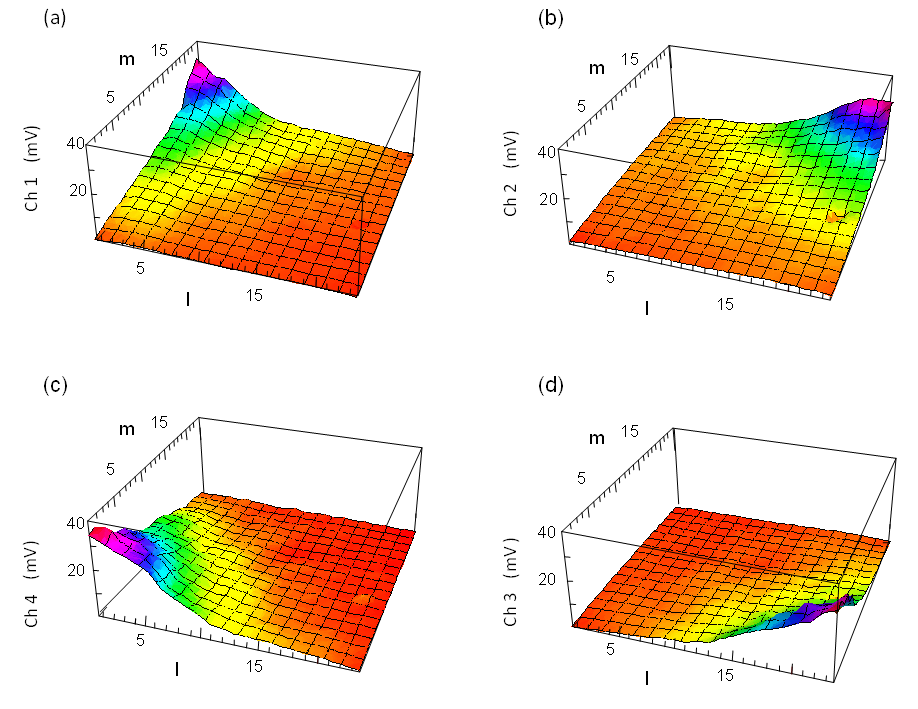
Abbildung 5: Signallandschaften der maximalen Spannungsamplituden an den vier Ausgängen Ch 1 bis Ch 4 des Ferroelektret-Touchpads. (a) – (d) zeigen jeweils die Signallandschaften der Ausgänge Ch 1 bis Ch 4.
Gemäß den hier entwickelten Konzepten lässt sich „elektronische Plastikhaut“ für Prothesen und Roboter herstellen, die es Maschinen ermöglicht „ihre Umwelt über den Tastsinn zu erfühlen“. Damit die Roboter der Zukunft sich ihrer Kräfte bewusst sind und uns „mit Gefühl“ die Hände schütteln können!

[Takao Someya, University of Tokyo, PNAS, 2004]